Algoritmos de Busca
Buscas Heurísticas e Avançadas
Busca em Grafos
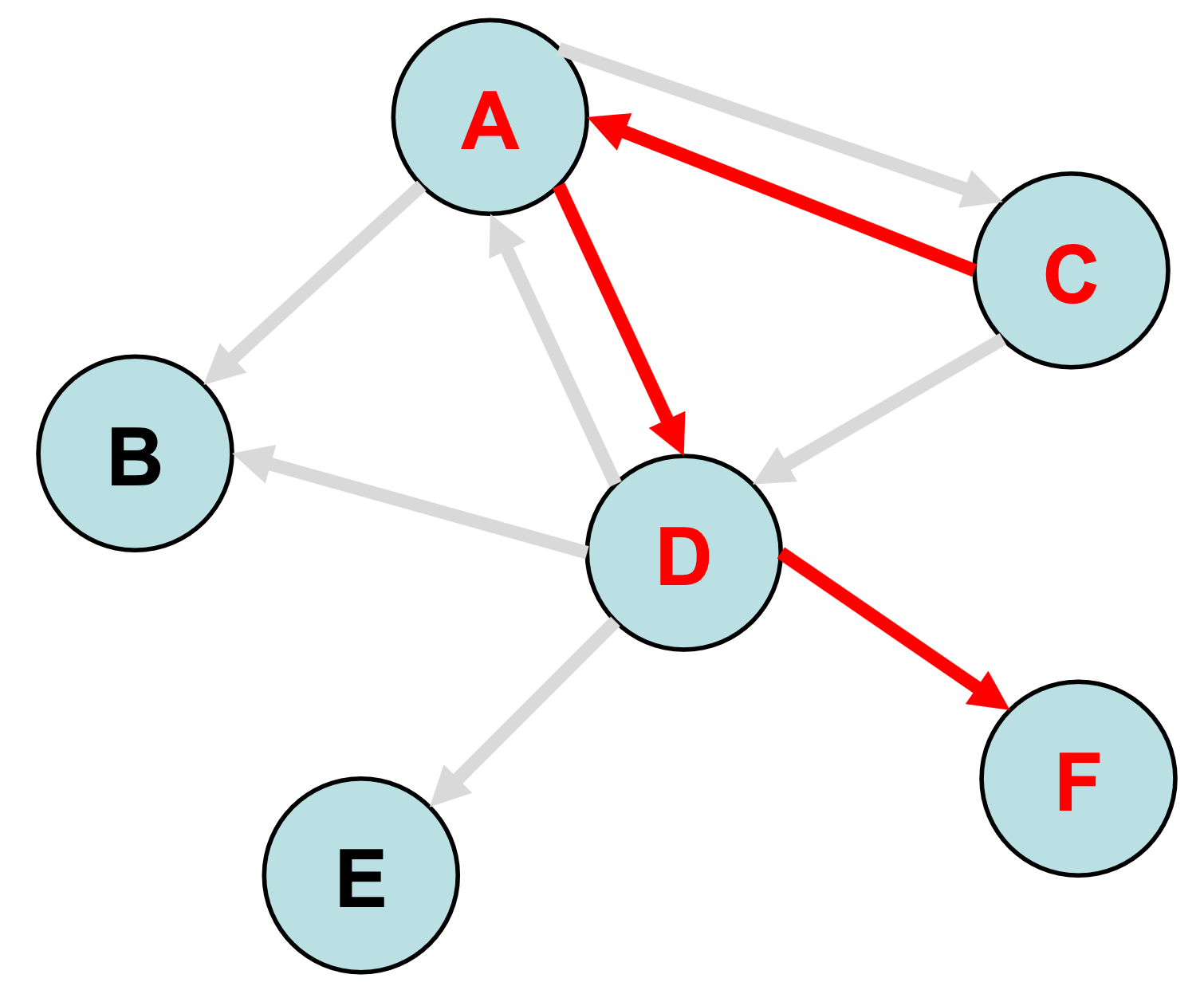
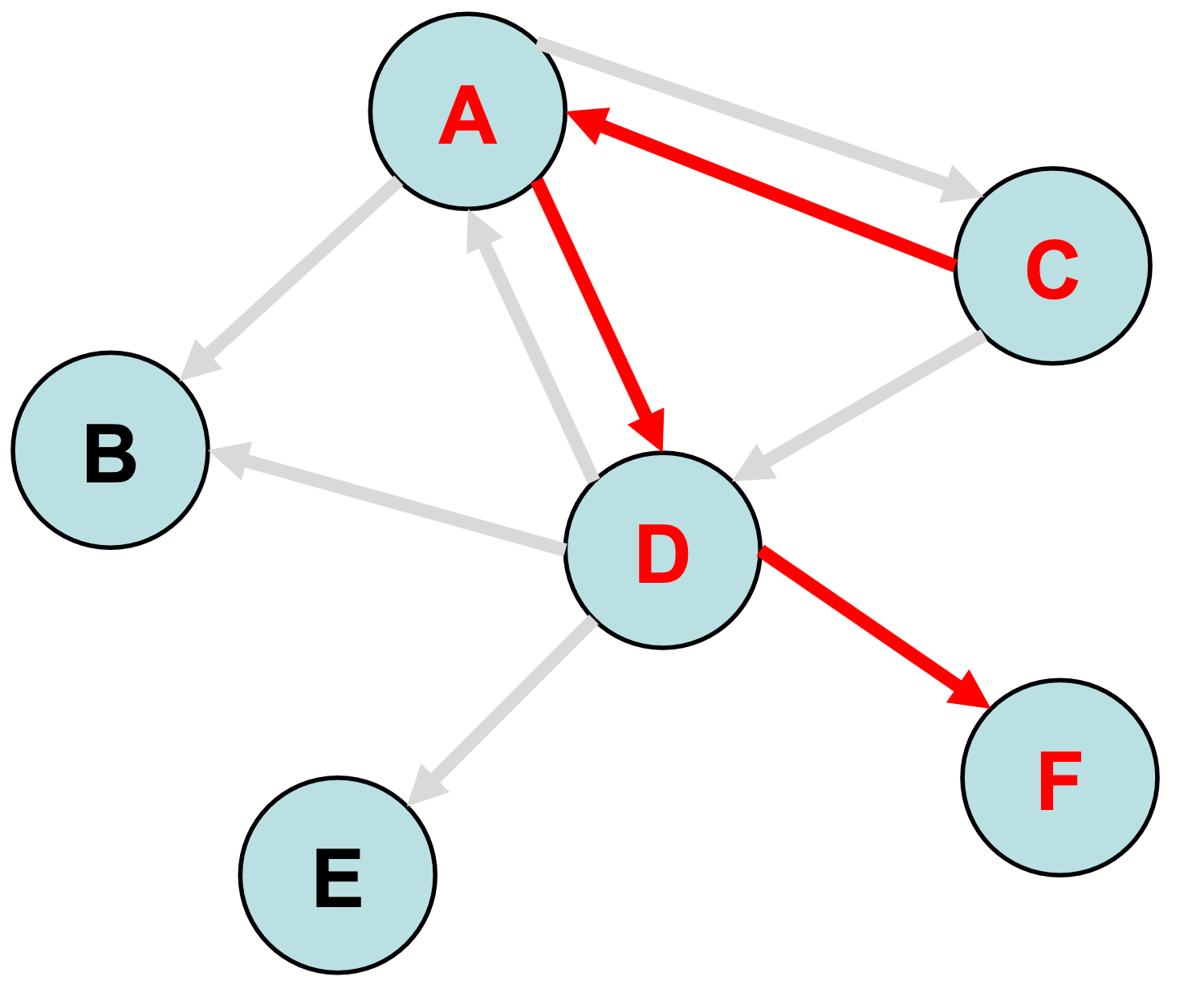
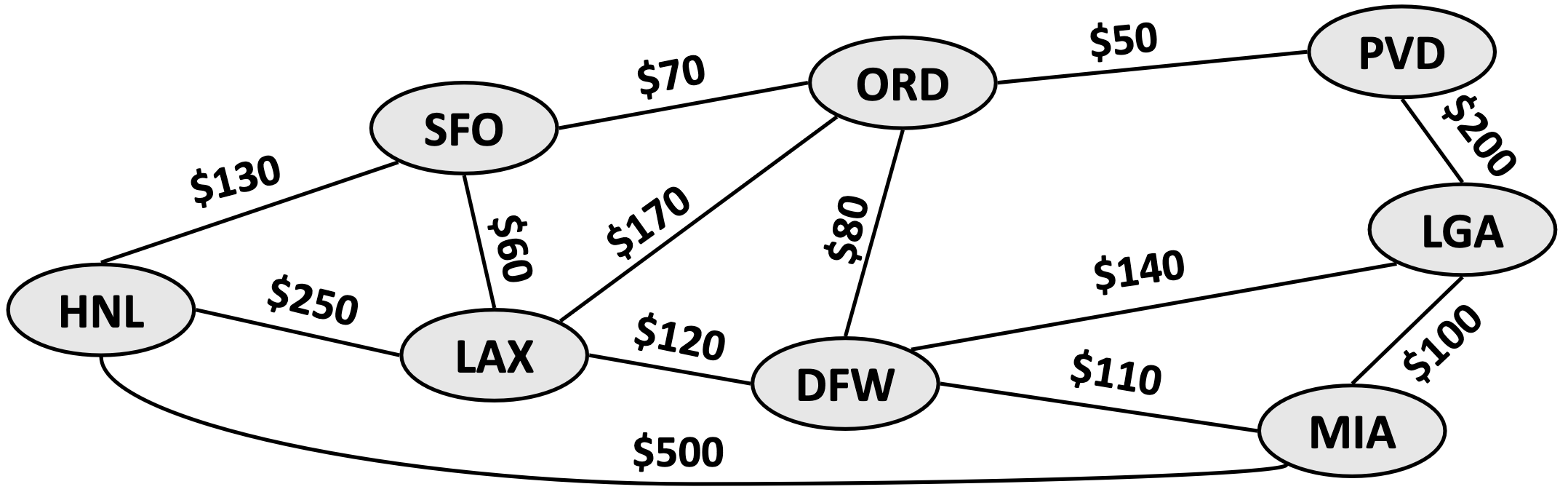
Grafos
- Um grafo consiste em um conjunto de nós conectados por arestas.
- Busca é usada em diversos domínios do mundo real:
- Navegação: encontrar o caminho mais curto ou rápido entre dois pontos.
- Robótica: planejar trajetórias de movimento.
- Resolução de puzzles: encontrar sequências de movimentos para atingir uma configuração.
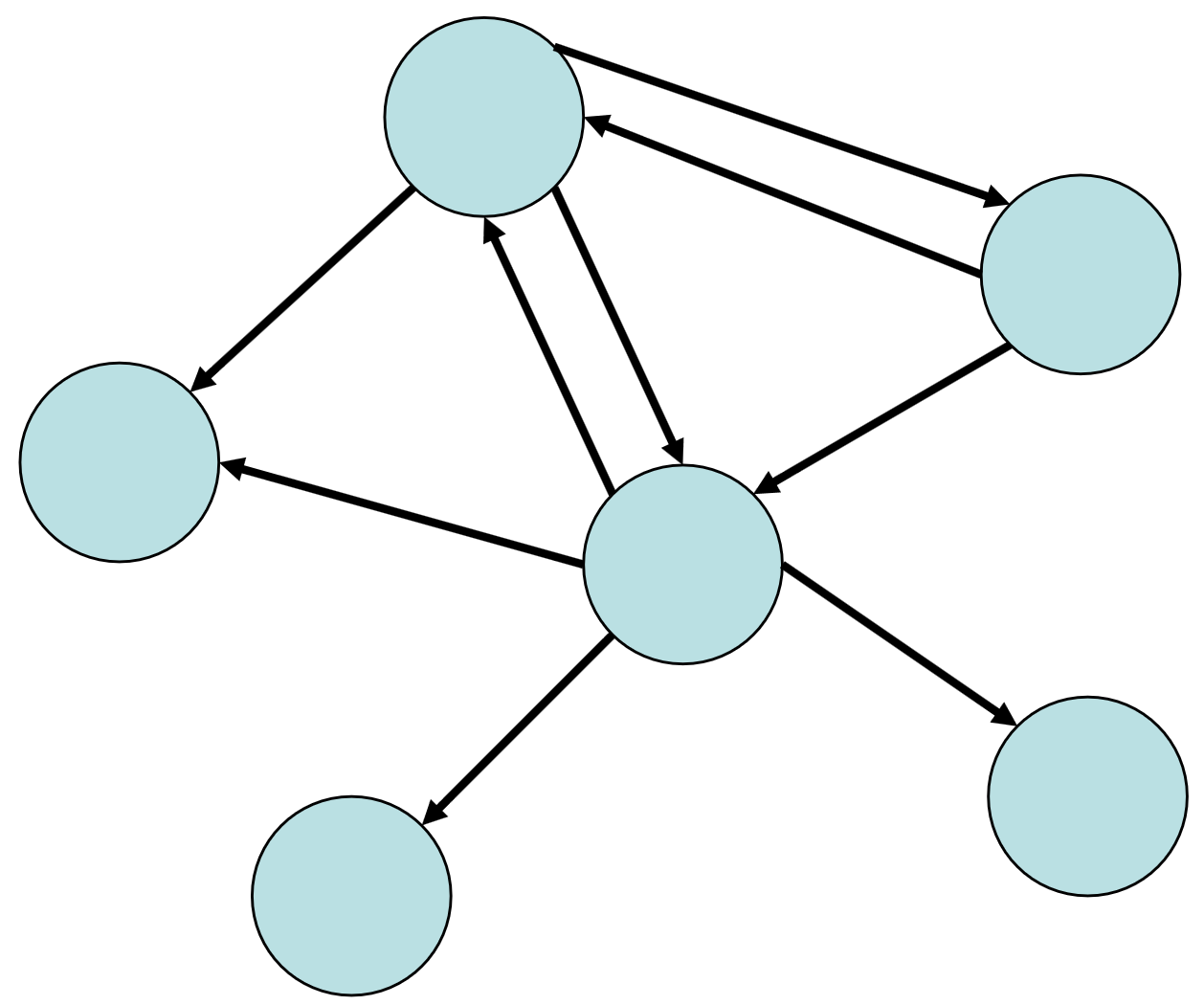
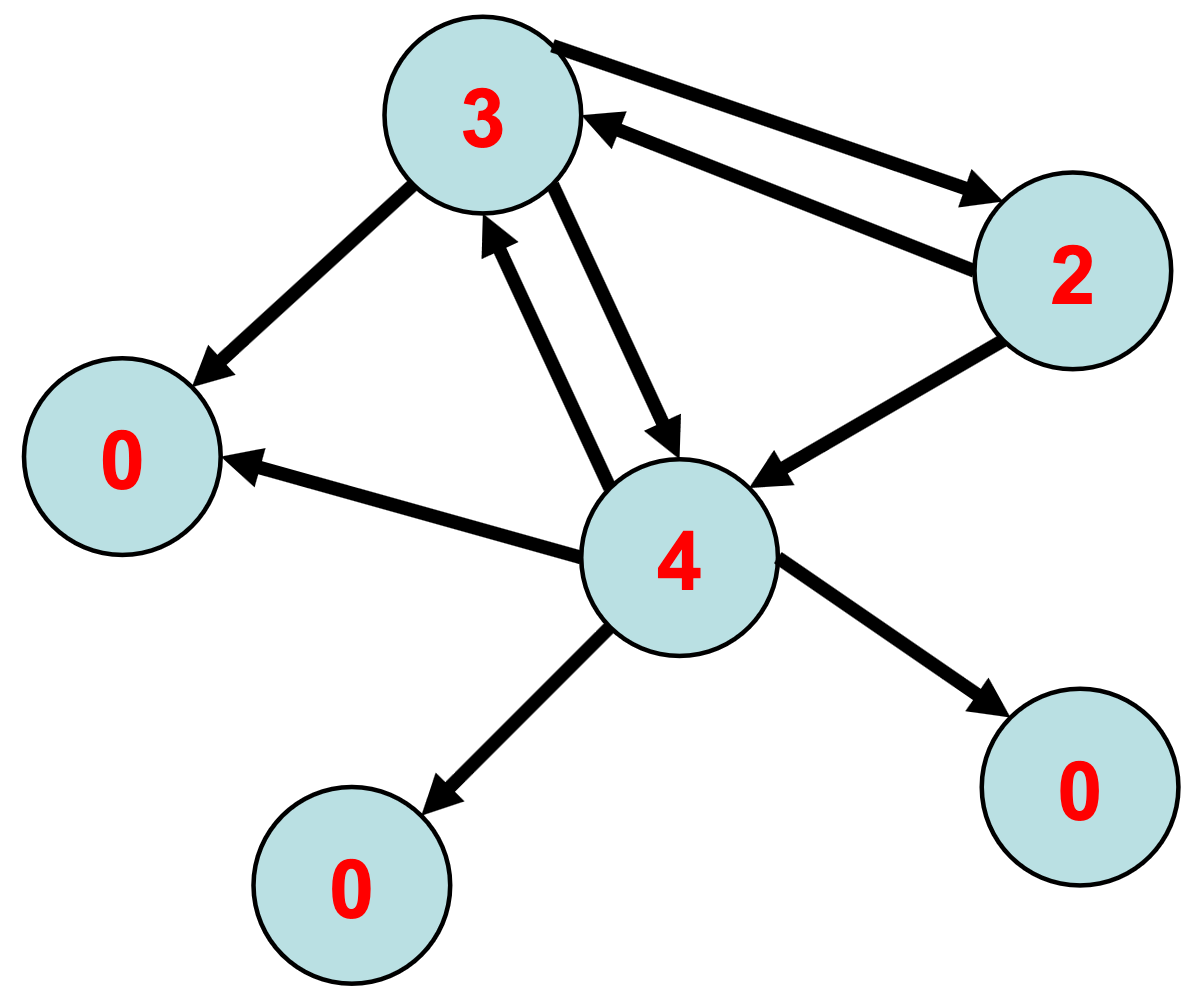
Nós de um grafos - pt. 1
- Grau:
- n.º de arestas conectadas
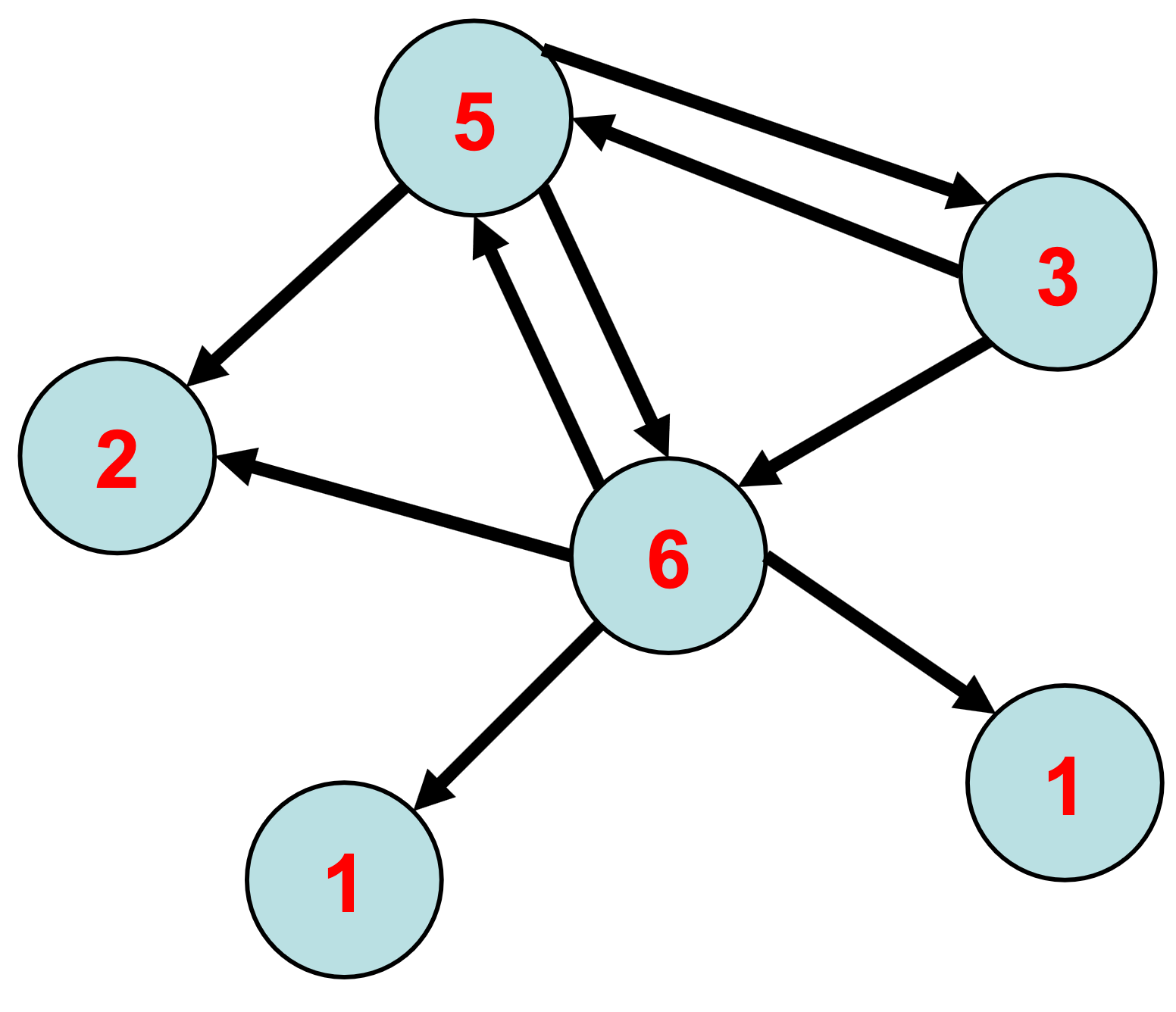
Nós de um grafos - pt. 2
- Grau:
- De entrada (direcionado, n.º de arestas de entrada)
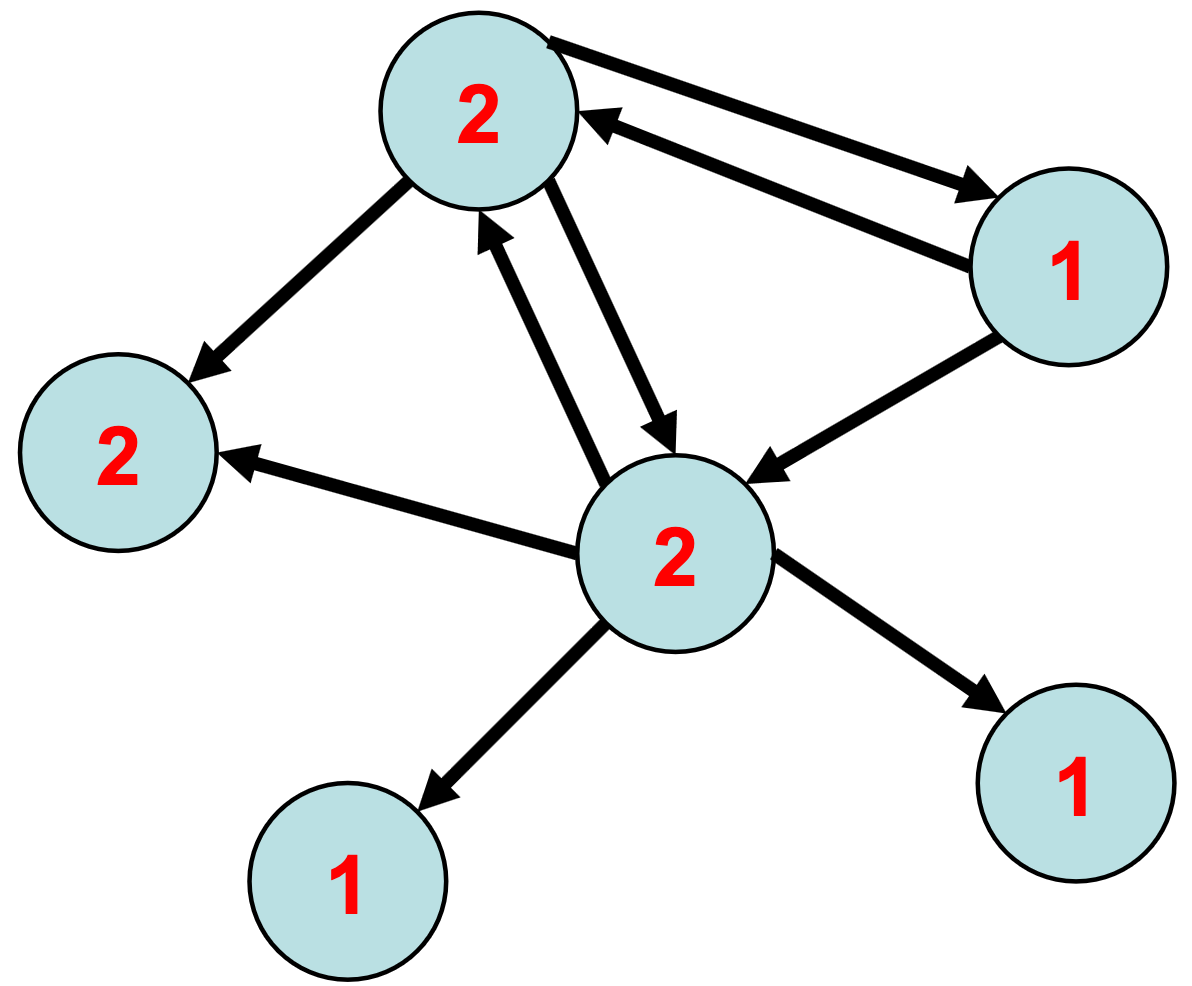
Nós de um grafos - pt. 3
- Grau:
- De saída (direcionado, número de arestas de saída)
Caminhos em grafos - pt. 1
- Caminho:
- Sequência de nós/arestas de um nó a outro
Caminhos em grafos - pt. 2
- Caminho:
- Nó x é acessível a partir do nó y se existir um caminho de y a x
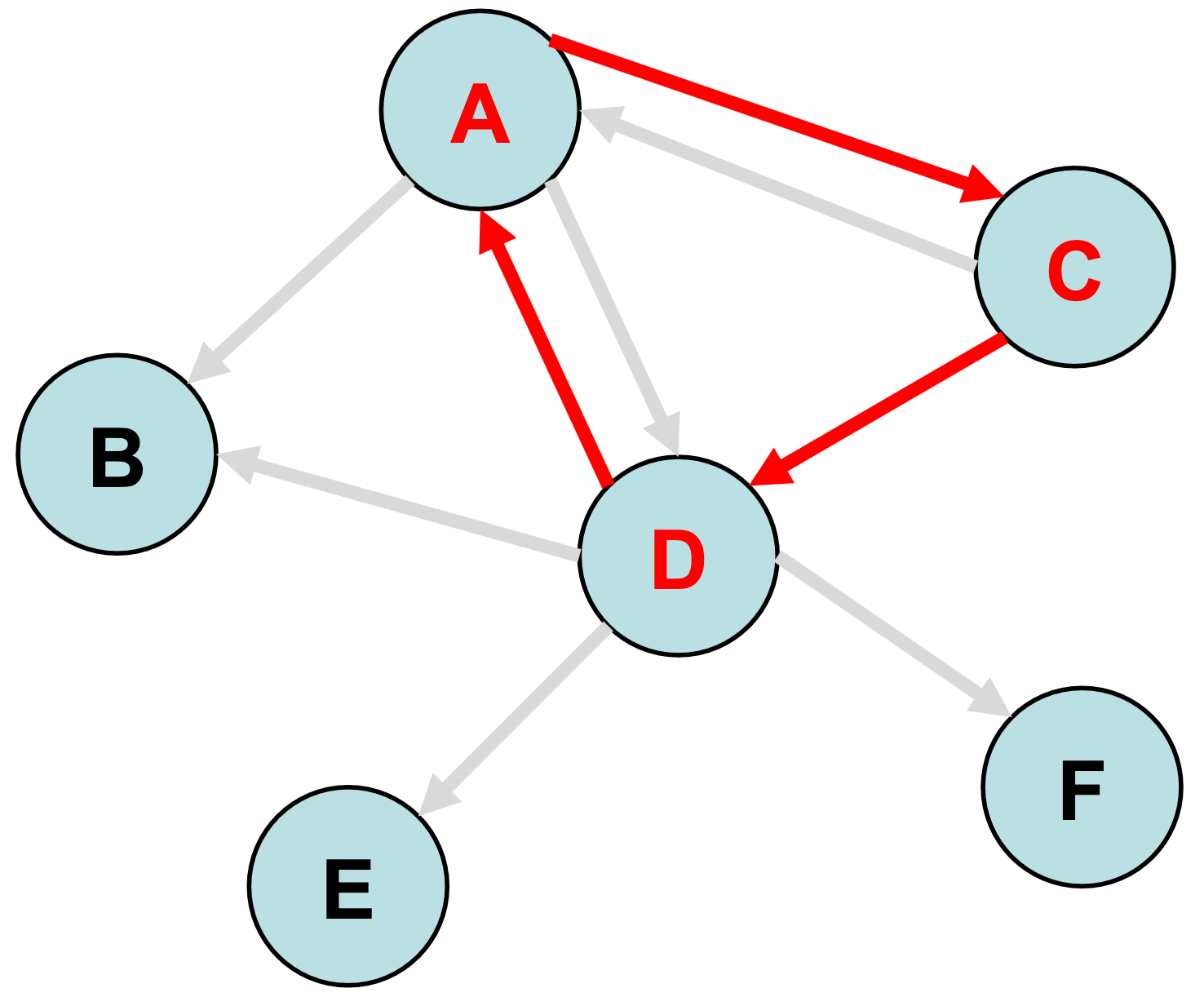
Caminhos em grafos - pt. 3
- Caminho:
- Um ciclo é um caminho que começa etermina no mesmo nó
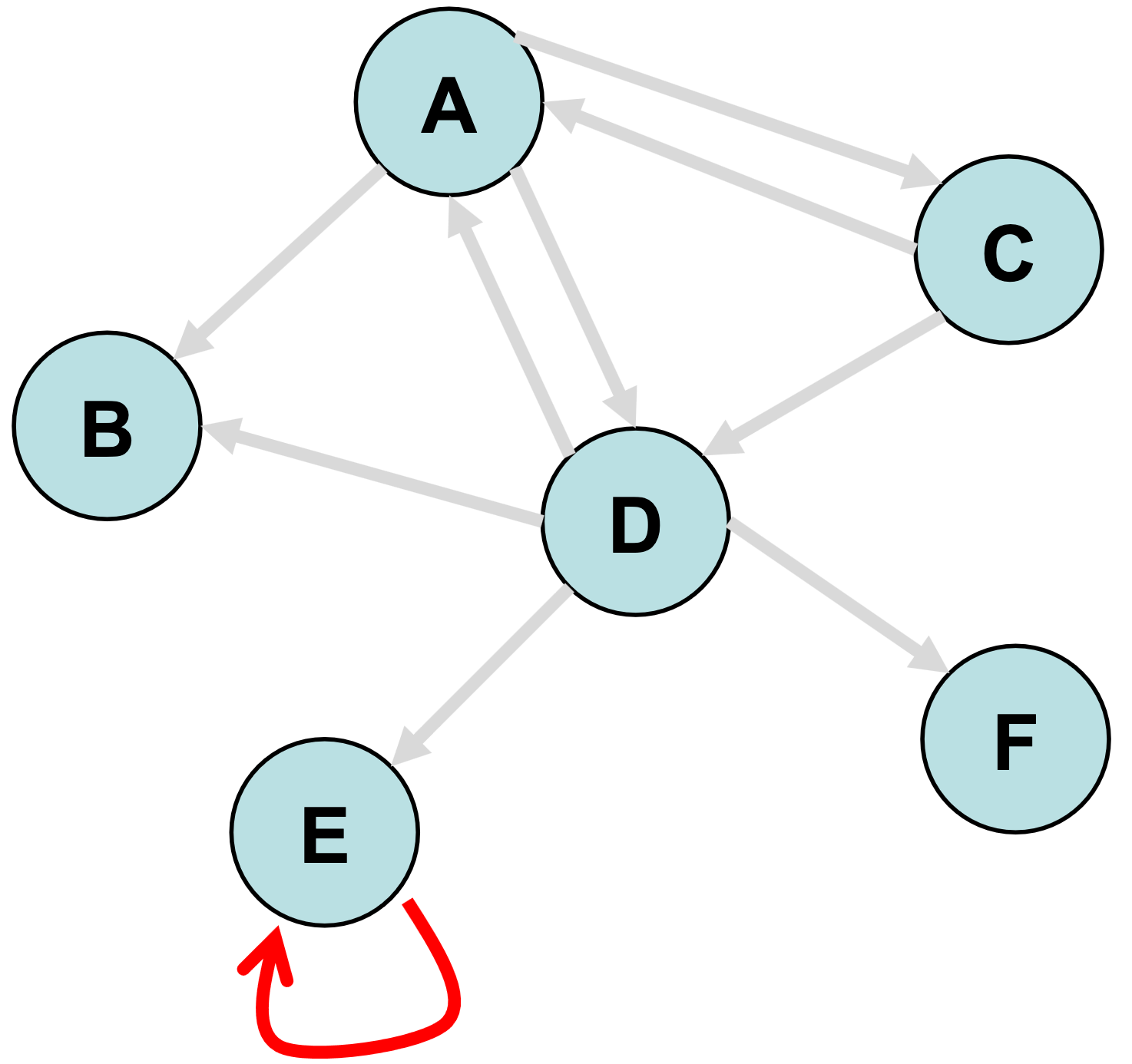
Caminhos em grafos - pt. 4
- Caminho:
- Um laço é uma aresta que conecta um nó a si mesmo
Buscando caminhos entre dois vértices
- Qualquer caminho (ou queremos saber se existe um caminho).
- Minimizar o comprimento do caminho (número de arestas).
- Minimizar o custo do caminho (soma dos pesos das arestas)
Força bruta e Backtracking
- Força bruta: tentar todas as possibilidades, retornar a solução
- Backtracking é uma técnica algorítmica que constrói uma solução passo a passo.
- A cada etapa, o algoritmo escolhe entre várias alternativas possíveis
- Solução
- Se uma escolha não levar a uma solução válida, ele retorna à decisão anterior e tenta outro caminho.
Busca em Profundidade (DFS)
- Explora um caminho completamente antes de retroceder.
- Utiliza uma pilha (LIFO).
- Pode ser implementada recursivamente.
- Ideal quando soluções estão em grande profundidade.
Busca em Profundidade (DFS)
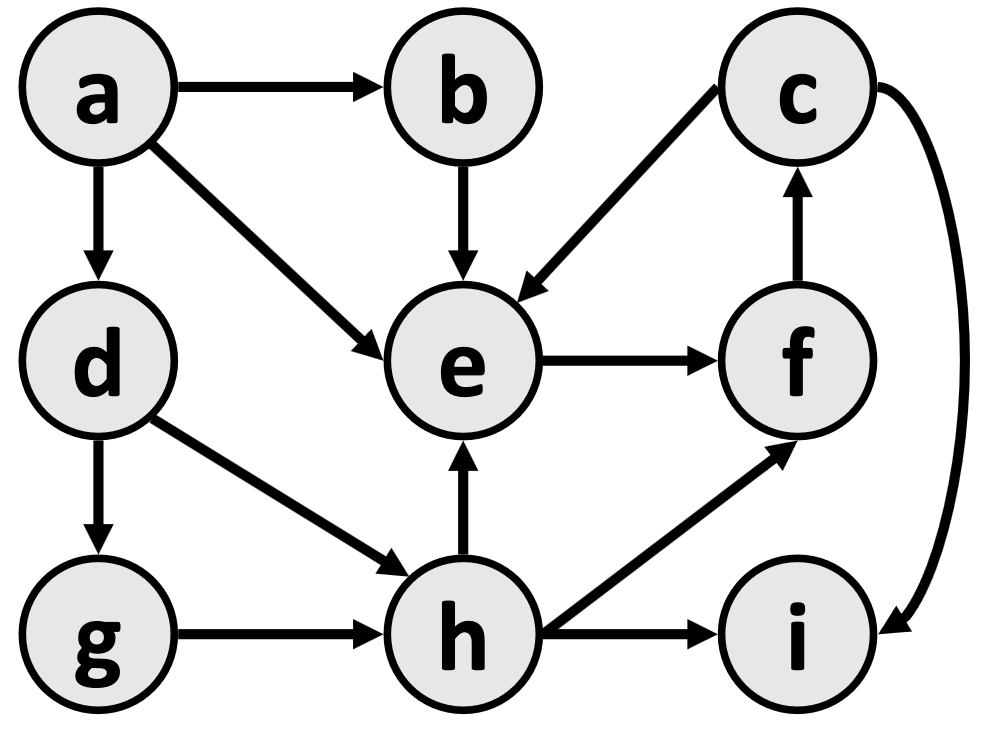
Funcionamento do DFS
- Visita o nó inicial.
- Seleciona um sucessor ainda não visitado.
- Repete até atingir folha ou objetivo.
- Retrocede (backtracking) quando necessário.
- a \(\to\) b \(\to\)e \(\to\)f \(\to\)c \(\to\)i
- a \(\to\) d \(\to\)h
Buscar caminho de a\(\to\) h, prioridade alfabética
Características do DFS
- escolher - explorar - desmarcar
- Não é ótimo. O DFS garante encontrar um caminho, mas não necessariamente o melhor/mais curto
- dfs(a, i) retorna {a, b, e, f, c, i} em vez de {a, d, h, i}.
Busca em Largura (BFS)
- Explora todos os nós de um nível antes do próximo.
- Utiliza uma fila (FIFO).
- Encontra o caminho mais curto em grafos não ponderados.
- É completo e ótima sob custo uniforme.
Funcionamento do BFS
- Insere o nó inicial na fila.
- Remove o primeiro nó.
- Expande seus sucessores.
- Repete até encontrar o objetivo.
Funcionamento do BFS
- Começo: {a}
- Alvo: {f}
- Começo: {a}
- Alvo: {f}
- Empilha: {b, d}
- Começo: {a}
- Pilha: {b, d}
- Alvo: {f}
- Desempilha {b}
- Empilha {e}
- Começo: {a}
- Pilha: {d, e}
- {Alvo: f}
- Desempilha {d}
- Empilha {g, h}
- Começo: {a}
- Pilha: {e, g, h}
- {f}
- Desempilha {e}
- Acha {f}
Características do BFS
- em grafos ponderados, nem sempre o custo é ótimo.
- é mais difícil reconstruir a sequência real de vértices ou arestas no caminho depois de encontrá-lo
- BFS explora muitos caminhos possíveis em paralelo, por isso não é fácil armazenar uma matriz/lista do caminho em andamento
Comparação BFS e DFS
Heurísticas
"Uma heurística estima o quão próximo estamos da solução."
- Hill Climbing
- Busca A*
- Computação Evolutiva
Como elas funcionam?
- Função h(n)
- Estimativa de custo restante
- Guia a busca
Por que usar heurísticas?
- Problemas NP-difíceis são comuns.
- Soluções exatas podem ser lentas demais.
- Uma boa solução agora vale mais do que a ótima depois.
- Aplicações reais exigem velocidade.
Hill Climbing
- Busca gulosa local
- Sempre escolhe o melhor vizinho
- Não considera caminhos alternativos
- enquanto houver melhoria:
- gerar vizinhos
- escolher melhor vizinho
- mover para ele
Procedimento
Vantagens
- Muito rápido
- Baixo consumo de memória
- Simples de implementar
- Máximos locais
- Platôs
- Cristas
- Dependência do ponto inicial
Problemas
Solução
- Random Restart
- Simulated Annealing
- Múltiplas inicializações
- Computação evolutiva
Busca A* (A-Star)
A* é um dos algoritmos de busca heurística mais importantes da Inteligência Artificial.
Ele combina o custo já percorrido com uma estimativa do custo restante.
- Busca exata quando a heurística é admissível.
- Busca aproximada quando priorizamos velocidade.
- Excelente equilíbrio entre custo e desempenho.
A* como Heurística
f(n) = g(n) + h(n)g(n): g(n) é o custo do caminho do nó inicial até n
h(n): é uma função heurística que estima o custo do caminho mais barato de n até o destino.
Qualidade da Heurística
| Heurística | Resultado | Notas |
|---|---|---|
| h(n)=0 | Dijkstra | Garante a descoberta do caminho mais curto. |
| h(n) \(\leq\) custo real | Ótimo e eficiente | Quanto menor for h(n), mais o A* se expande, tornando-se mais lento. |
| h(n) = custo real | Busca ideal | Segue o melhor caminho e nunca se desvie dele |
| h(n) \(\gt\) custo real | Superestima | Mais rápida, mas não ótima |
| h(n) >> g(n) | h(n) domina | BFS |
Algoritmo
- Inserir o estado inicial na fila de prioridade.
Repetir:
- Selecionar o nó com menor f(n)=g(n)+h(n).
- Se for o objetivo, encerrar.
- Adicionar sucessores na fila.
- Atualizar custos e reinserir nós.
Exemplos - diferentes distâncias
Manhattan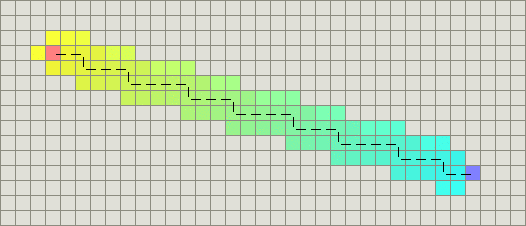
Diagonal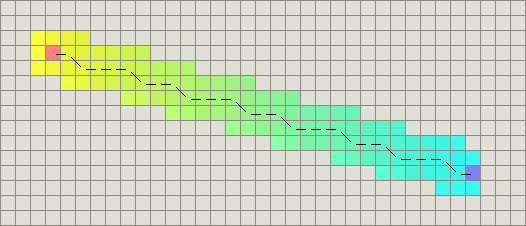
Euclidiana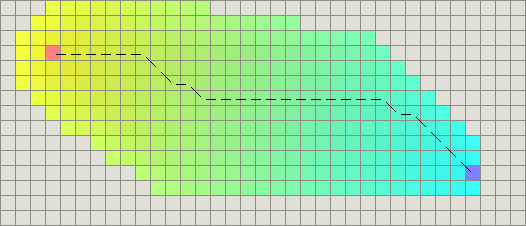
Computação Evolutiva
Meta-Heurísticas Inspiradas na Natureza
A Computação Evolutiva reúne técnicas de otimização baseadas nos princípios da evolução biológica, como seleção natural, reprodução e mutação.
O que é uma Meta-Heurística?
- Estratégia geral de busca e otimização.
- Aplicável a uma grande variedade de problemas.
- Não garante optimalidade global.
- Busca soluções de alta qualidade em tempo viável.
"Boas soluções, rapidamente, para problemas difíceis."
Principais Meta-Heurísticas
- Algoritmos Genéticos
- Simulated Annealing
- Particle Swarm Optimization
- Ant Colony Optimization
- Evolution Strategies
Algoritmos Genéticos
Propostos por John Holland na década de 1970, simulam a evolução de uma população de soluções candidatas.
- População de indivíduos
- Seleção natural
- Cruzamento
- Mutação
- Sobrevivência dos mais aptos
Representação dos Indivíduos
- Cada solução é um cromossomo.
- Pode ser binário, inteiro ou real.
- Genes representam variáveis do problema.
Exemplo: 1011010110010101
Ciclo Evolutivo
- Inicialização da população
- Avaliação (fitness)
- Seleção
- Cruzamento
- Mutação
- Substituição
- Critério de parada
Função de Fitness
Mede a qualidade de cada indivíduo.
Quanto maior o fitness, melhor a solução.
- Objetivo da otimização
- Base para seleção
Seleção
- Roleta (Roulette Wheel)
- Torneio
- Rank Selection
Indivíduos mais aptos possuem maior probabilidade de reprodução.
Cruzamento (Crossover)
Combina características de dois pais.
Pai 1: 110011|1010
Pai 2: 001101|0111
Filho 1: 1100110111
Filho 2: 0011011010
- Ponto único
- Dois pontos
- Uniforme
Mutação
Introduz diversidade genética.
Antes: 1100110111
Depois:1100100111
- Evita convergência prematura.
- Permite explorar novas regiões.
Algoritmo Genético Populacional
def genetic_algorithm():
populacao = inicializar()
while not criterio_parada():
fitness = avaliar(populacao)
pais = selecionar(populacao, fitness)
filhos = crossover(pais)
filhos = mutação(filhos)
populacao = substituir(populacao, filhos)
return melhor_individuo(populacao)
Exemplo Prático
Maximizar:
f(x) = \(\Sigma\)(x)
com x ∈ [-1, 1]
- Representação: array de 5 números reais
- Fitness = \(\Sigma\)(x)
- [-0.28, -1.16,-1.94, 0.86, 0.15] \(\to\) f(x) = -2.37
- [ 0.71, -0.24, -1.58, -1.40, -0.31] \(\to\) f(x) = -2.83
- [1.03, 0.18, 1.15, 0.60, 1.63] \(\to\) f(x) = 4.60
- [-0.54, -0.04, 1.85, 1.24, -0.06] \(\to\) f(x) = 2.44
- [-0.10, 0.73, -0.71, -0.53, 1.18] \(\to\) f(x) = 0.57
Crossover e mutação
- Crossover:
- Pai 1: [1.03, 0.18, 1.15, 0.60, 1.63]\(\to\) f(x) = 4.60
- Pai 2: [-0.54, -0.04, 1.85, 1.24, -0.06] \(\to\) f(x) = 2.44
- Filho 1: [1.03, 0.18, 1.15, 1.24, -0.06] \(\to\) f(x) = 3.54
- Filho 2: [-0.54, -0.04, 1.85, 0.60, 1.63] \(\to\) f(x) = 3.50
- Mutação:
- Filho 2: [-0.54, -0.04, 1.85, 0.60, 1.63]\(\to\) f(x) = 3.50
- Novo: [-0.54, -0.04, 1.85, 0.60, 2.78]\(\to\) f(x) = 4.64